![]()
en.radzio.dxp.pl
Main menu
Index
Privacy policy
Youtube channel
PCB Manufacturer
Tutorials
STM32F429I-DISCOVERY
STM32VLDISCOVERY
Code library for LCD
S1D15705
SSD1963
SED1335/RA8835
SED1520/NJU6450
SED1530/SPLC501C
KS0108/HD61202
S6B0724
T6963C
ATMEL AVR microcontrollers
HD44780 driver
1-wire driver
Delay utilities
Decoding RC5 infrared
iButton CRC computing
iButton reader
ATtiny2313 board
ATmega162 board
STMicro ST7 microcontrollers
Software I2C impementation
External I2C EEPROM memory
Projects
SPI bus sniffer
I2C bus sniffer
1-wire sniffer
AVR910 programmer
Software
Bitmap converter for LCD
Modbus Master Simulator
Lesson 6. Pulse Width Modulation (PWM)
In lesson 5 we learn how to blink led with Compare unit of timer TIM3. Compare unit can be also used in pulse width modulation mode for brightness control of LED. Now, go to section number 13.3.9 of RM0041 document.
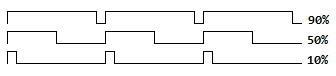
Different PWM duty
Configuration of compare module are slighty different from previous example :
TIM3->CCMR2 = TIM_CCMR2_OC4M_2 | TIM_CCMR2_OC4M_1 | |
Now, CCR3 and CCR4 registers holds PWM duty value. Write initial duty value to registers :
TIM3->CCR3 = 0; // Start PWM duty for channel 3 |
Each time when timer reload new value we want to change current PWM duty in both channels. So in interrupt handler from TIM3 we well be change duty on both channels. On CH3 we increase duty by 1% each time, on CH4 we decrease duty by 1% each time :
void TIM3_IRQHandler(void) |
Complete source code :
//============================================================================= #define LED_GREEN_GPIO GPIOC #if (LED_BLUE_PIN > 7) #if (LED_GREEN_PIN > 7) AFIO->MAPR = AFIO_MAPR_TIM3_REMAP; // Full TIM3 remap TIM3->PSC = 239; // Set prescaler to 24 000 (PSC + 1) TIM3->CCR3 = 0; // Start PWM duty for channel 3 TIM3->CCMR2 = TIM_CCMR2_OC4M_2 | TIM_CCMR2_OC4M_1 | TIM3->CCER = TIM_CCER_CC4E | TIM_CCER_CC3E; // Enable compare on channel 3 & 4 TIM3->DIER = TIM_DIER_UIE; // Enable update interrupt (timer level) while (1) {} |